在过去的十年左右的时间里,机器学习的进步推动了自动驾驶系统,虚拟助手和移动机器人等系统的发展,这些系统越来越具有自主性。除其他事项外,开发自主系统的研究人员需要找出方法来集成旨在解决不同但又互补的子任务的组件。
例如,在人类用户家中完成手动任务的机器人应该能够感知其环境中的对象,同时还可以获取有关这些对象的信息,这些信息随后可用于计划其动作和动作。这个过程也被称为“感知-认知-行动”范例,具有至关重要的意义,因为它最终使机器人能够提出有用的策略并有效地完成任务。
到目前为止,大多数在机器人中实现这种感知-认知-行动范例的方法都将这三个任务视为几乎完全独立的模块,彼此之间互为黑匣子。但是,不来梅大学和德国慕尼黑大学的一组研究人员认为,将机器人的“感知”系统与其认知(即“推理”或检索周围环境中物体信息的能力)联系起来可以大大改善其整体性能。

考虑到这一点,研究人员最近开发了一种认知感知系统,可以增强移动机器人在日常操纵任务中的性能。这个被称为ROBOSHERLOCK的系统通过内容分析(CA)获得感知,该策略需要使用统计方法来分析大量数据。
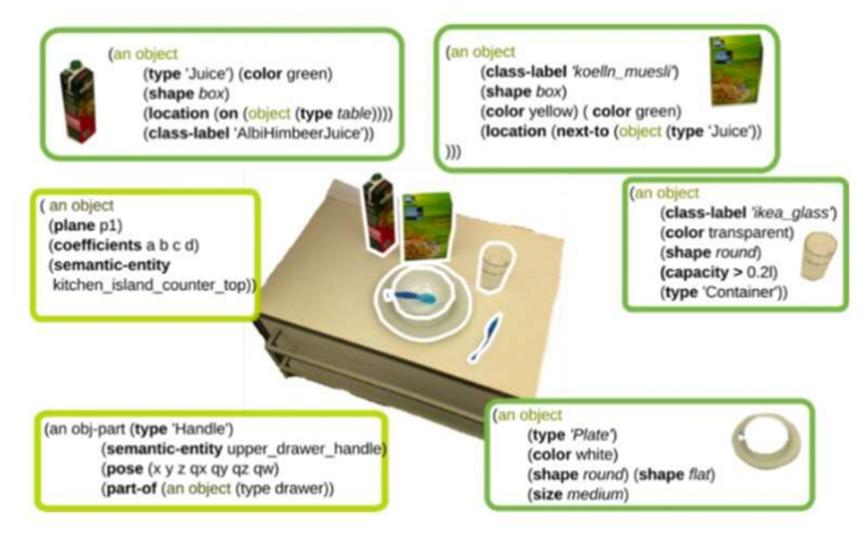
ROBOSHERLOCK分析的数据是“非结构化”的,因为其结构不能像在数据库或电子表格中那样反映与之关联的语义。因此,该系统使用一种称为非结构化信息管理(UIM)的策略,这实质上意味着它可以使用一组信息提取算法来处理大量非结构化数据(例如,文本文档,音频文件,图像等)。这些算法中的每一种都根据其“专业知识”提取不同类型的知识,随后对其进行评级和组合以得出一个一致的决策。
研究人员在论文中写道:“在ROBOSHERLOCK中,对现实场景的感知和解释被制定为非结构化信息管理(UIM)问题。” “ UIM原理的应用支持感知系统的实施,该感知系统可以回答与场景中对象有关的任务相关查询,通过结合多种感知算法的优势来提高对象识别性能,支持基于知识的对象推理,并实现自动和知识驱动的处理管道生成。”

研究人员通过一系列测试评估了他们的框架,并将其应用于现实世界场景感知的不同系统。他们发现,“推理”有关(即处理)通过其算法检索到的背景知识可以使ROBOSHERLOCK回答各种各样的问题,而在周围环境中则是可以直接感知到的。
研究人员在最近的研究中介绍的ROBOSHERLOCK组件可被视为其核心功能。随后,研究人员还开发了一些扩展,以增强系统的认知能力。例如,他们创建了一个扩展,该扩展允许系统同时检测人类和物体,从而推断人类正在执行的动作以及这些动作的意图。
研究人员在论文中写道:“最近,我们已经研究了ROBOSHERLOCK框架如何使代理能够'梦想',并使用最先进的游戏引擎生成任务的变体并学习新的感知模型。” “所有这些扩展都是从机器人执行任务的角度着眼于机器人感知,如果没有此处介绍的核心框架,这是不可能的。”