过去,机器人只能在工厂进行繁重的工作或进行精细的工作。现在,波士顿动力公司灵活的四足机器人Spot可供公司租借以执行各种实际工作,这标志着近年来人机之间的普通交互已经变得多么普遍。
尽管Spot具有通用性和鲁棒性,但它却被社会视为传统机器人,即金属和硬塑料的混合物。许多研究人员坚信, 能够与人进行安全的物理交互的软机器人(例如,通过抓握和移动物体来提供室内帮助)将与硬机器人一起为未来创造条件。
柔软的机器人技术和可穿戴计算机,这两种对于人类交互而言都是安全的技术,它们将需要新型的材料,这些材料必须柔软,可拉伸并具有多种功能。我和我的同事在卡内基梅隆大学软件实验室研究了这些多功能材料。与 合作者一起,我们最近开发了一种这样的材料,它独特地结合了金属,软橡胶和形状记忆材料的特性。
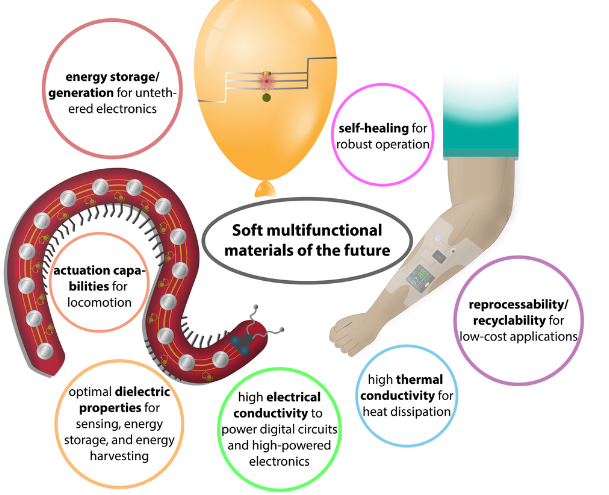
这些柔软的多功能材料(我们称为它们)可以导电,检测损坏并自我修复。它们还可以感应触摸并响应电刺激(例如人造肌肉)改变其形状和刚度。在许多方面,这都是开创性的研究人员Kaushik Bhattacharya和Richard James所说的:“ 材料就是机器。”
使材料智能化
物质就是机器这一思想可以体现在体现智能的概念中。该术语通常用于描述互连的材料系统,例如膝盖的肌腱。跑步时,每次脚踩到地面时,筋都可以拉伸和放松以适应,而无需任何神经控制。
还可以在一种材料中考虑体现的智能-一种可以感知,处理和响应其环境的智能,而无需诸如传感器和处理单元之类的嵌入式电子设备。
一个简单的例子是橡胶。在分子水平上,橡胶包含成串缠绕在一起的分子串。拉伸或压缩橡胶会移动并解开琴弦,但它们的连接会迫使橡胶弹回其原始位置而不会永久变形。橡胶“知道”其原始形状的能力包含在材料结构中。
由于未来适用于人机交互的工程材料将需要多功能性,因此研究人员试图将新的体现智能水平(不仅是拉伸)构建到橡胶等材料中。最近,我的同事们创建了嵌入橡胶的自愈电路。
他们首先将包裹在电绝缘“皮肤”中的微型液态金属小滴分散在整个硅橡胶中。在其原始状态下,皮肤的薄金属氧化物层可防止金属滴导电。
然而,如果嵌入金属的橡胶受到足够的力,则液滴将破裂并聚结以形成导电路径。印在该橡胶上的任何电线都会自愈。在另一项研究中,他们表明自我修复机制也可用于检测损害。在损坏的区域中形成新的电线。如果有电信号通过,则表明已损坏。
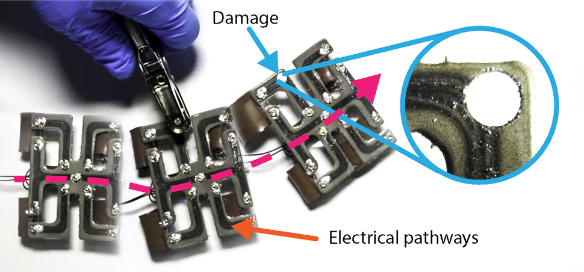
液态金属和橡胶的结合为材料提供了一种感知和处理其环境的新途径-即体现智能的新形式。液态金属的重新排列使材料“知道”由于电响应而发生损坏的时间。
形状记忆是材料体现智能的另一个例子。这意味着材料可以可逆地更改为规定的形式。形状记忆材料是软机器人中直线运动的理想选择,可以像二头肌一样来回移动。但是它们还提供了独特而复杂的形状改变功能。
例如,最近有两组材料科学家演示了如何将一类材料 从平坦的橡胶状薄片可逆地转换为面部的3D地形图。对于传统的电动机和齿轮而言,这是一项壮举,但是对于此类材料而言,由于材料的内在智能,它很简单。研究人员使用了一类称为液晶弹性体的材料,有时将它们称为人造肌肉,因为它们可以通过施加热,光或电等刺激而伸缩。